Detalle del producto
Etiquetas de productos
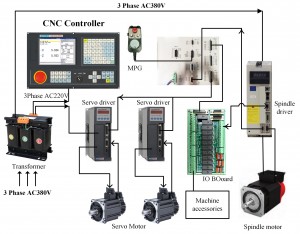
Serie 110 de servomotor:
| Potencia nominal del modelo (kW) | 110-02030 | 110-04020 | 110-04030 | 110-05030 | 110-06020 | 110-06030 | | 0.6 | 0.8 | 1.2 | 1.5 | 1.2 | 1.8 | | Corriente nominal (A)MáximoPar motor (Nm) | 2.5 | 3.5 | 5.0 | 6.0 | 4.5 | 6.0 | | 6 | 12 | 12 | 15 | 12 | 18 | | Velocidad nominal (iVmin)RotorInercia (Kg-m2) | 3000 | 2000 | 3000 | 3000 | 2000 | 3000 | | 0,31 X10-3 | 0,54X103 | 0,54X103 | 0,63 X10-3 | 0,76 x 10-3 | 0,76 X10-3 | | Coeficiente de par (N.mM) Contraelectromotriz (V/1000 r/min) Bobinado de alambre (Q) Inductancia de alambre (mh) Constante de tiempo eléctrica (Ms) | 0.8 | 1.14 | 0.8 | 0.83 | 1.3 | 1.0 | | 56 | 79 | 54 | 62 | 83 | 60 | | 3.6 | 2.41 | 1.09 | 1.03 | 1.46 | 0.81 | | 8.32 | 7.3 | 3.3 | 3.43 | 4.7 | 2.59 | | 2.3 | | 3 | 3.33 | 3.2 | 3.2 | | Peso (Kg)Voltaje de entrada del controlador (V) | 4.5 | 6 | 6 | 6^8 | 7.9 | 7.9 | | CA 220 V | | Número de pares de polos del codificador (P/R) | 2500/Tipo absoluto 17 bits | | 4 | | Clase de aislamiento | F | | Ambiente | Temperatura: -20°C~+40°C Humedad: Relativa 00% | | Clase de protección | IP65 | |
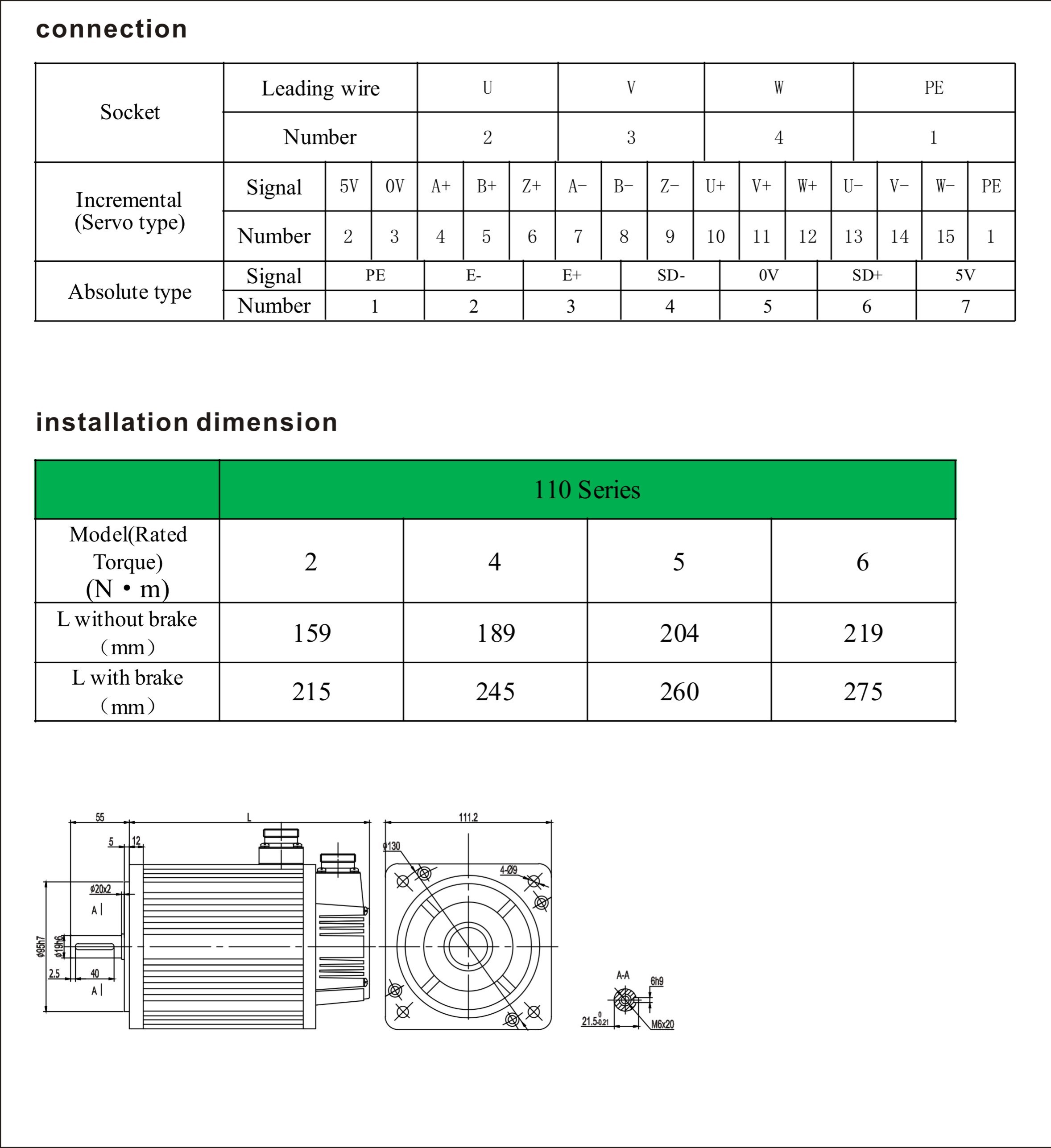
conexión:
| Enchufe | Cable conductor | U | V | W | PE |
| Número | 2 | 3 | 4 | 1 |
| Incremental | Señal 5V 0V A+ | B+ Z+ A- B- | Z-U+ | V+ W+ | U-V-O-PE |
| 'tipo) | Número 2 3 4 | 5 6 7 8 | 9 10 | 11 12 | 13 14 15 1 |
| Absoluto | Señal PE | E- E+ | DAKOTA DEL SUR- | OV | SD+ 5V |
| tipo | Número 1 | 2 3 | 4 | 5 | 6 7 |
Anterior: brazo robótico industrial de robot de soldadura Próximo: Controlador CNC de fresado RTCP para centro de fresado